ЛЕКЦИЯ 7
СИНТЕЗАТОРЫ ЧАСТОТЫ В ПЕРЕДАЮЩИХ УСТРОЙСТВАХ
План лекции:
Основные понятия синтеза частот
Параметры систем синтеза частот
Классификация систем синтеза частот
Принципы действия различных типов синтезаторов
1 Основные понятия теории синтеза частот
Для переноса модулированного сигнала на требуемую частот для передачи необходимо сформировать колебание с частотой, лежащей в рабочем диапазоне передатчика.
В передающих устройствах для формирования требуемых частот могут использоваться синтезаторы частот .
Современные системы синтеза частот работают в диапазоне частот от долей герц до десятков гигагерц. Они используются в аппаратуре различного назначения, заменяя в ней простые автогенераторы.
Синтезом частот ‑ называют процесс получения одного или нескольких колебаний с нужными номинальными значениями частоты из конечного числа исходных колебаний путем преобразования частот, т.е. с помощью таких операций над колебаниями, при которых происходит сложение, вычитание частот и (или) умножение и деление их на рациональные числа.
Комплекс устройств, осуществляющих синтез частот, называют системой синтеза частот . Если система синтеза частот выполнена в виде конструктивно самостоятельного устройства, то ее называют синтезатором частот .
2 Параметры систем синтеза частот
Показатели, позволяющие оценить качество формирования выходного колебания (чистоту его спектральной линии, т.е. отличие его от моногармоники). Как техническое устройство любая ССЧ характеризуется рядом эксплуатационно-технических характеристик.
Основными эксплуатационно-техническими характеристиками ССЧ, используемых в возбудителях радиопередатчиков и в качестве гетеродинов радиоприемников, являются:
Совокупность номинальных значений частот, которые могут быть получены на выходе системы синтеза частот и следуют друг за другом через заданный интервал, называют сеткой частот .
Интервал
между соседними номинальными значениями
частоты, входящими в сетку частот,
называют шагом
сетки частот
.
B настоящее время,в радиопередающей и
радиоприемной аппаратуре широко
используются системы синтеза частот с
шагом сетки
 Гц, где а ‑ целое положительное или
отрицательное число или нуль. Кроме
того получили распространение системы
с шагом сетки
Гц, где а ‑ целое положительное или
отрицательное число или нуль. Кроме
того получили распространение системы
с шагом сетки
 Гц.
Гц.
3 Классификация систем синтеза частот
Колебания, являющиеся исходными в процессе синтеза частот, получают от высокостабильных источников, которые называют опорными генераторами (OГ 1 , ΟΓ 2 , ..., ОГ n на рис. 1). Частоты колебаний этих генераторов (f 01 , f 02 , …, f on на рис. В1) называют опорными частотами, точнее, первичными опорными частотами. Современные системы синтеза частот работают, как правило, от одного опорного генератора (рис. B.2). Такие системы называют одноопорными (когерентными) . При двух и более опорных генераторах системы называют многоопорными (некогерентными) .
При этом речь может идти об одном колебании, частота которого способна принимать любое из этих значений (см. рис. B.1a), или нескольких одновременно существующих колебаниях (см. рис. B.1б ). Первый случай встречается в возбудителях радиопередатчиков гетеродинах радиоприемников, второй - в многоканальной аппаратуре с частотным разделением каналов.

Обычно в одноопорных системах синтеза частот сначала устройство, называемое датчиком опорных частот (ДОЧ) или, точнее, датчиком вторичных опорных частот, формирует вспомогательные колебания, частоты которых называют вторичными опорными частотами. Затем устройство, называемое датчиком сетки частот (ДСЧ), вырабатывает из этих вспомогательных колебаний нужные выходные колебания, частоты которых образуют сетку. Некоторые колебания подаются на выход непосредственно от ДОЧ (см. рис. B.2).

Все типы ССЧ делят на два класса:
системы активного синтеза частот;
системы пассивного синтеза частот.
Системами активного синтеза частот или, сокращенно, системами активного синтеза называют системы когерентного синтеза частот, в которых фильтрация колебания синтезируемой частоты осуществляется с помощью активного фильтра в виде фазовой автоподстройки частоты (ФАПЧ).
Системами пассивного синтеза частот или, сокращенно, системами пассивного синтеза называют системы когерентного синтеза частот, в которых фильтрация колебания синтезируемой частоты осуществляется без применения ФАПЧ.
Системы того и другого классов могут быть выполнены целиком на аналоговых элементах или с применением цифровой элементной базы.
4 Пример работы синтезаторов на базе аналогового пассивного синтеза частот
Ha
рис. 1.4 представлена структурная схема
простейшей системы пассивного синтеза,
построенной на аналоговой элементной
базе. Колебание опорного генератора
(ОГ), имеющее частоту f 0
(первичная
опорная частота), подается на вход
датчика опорных частот. B
датчике опорных частот (ДОЧ)
с помощью умножителя и делителя частоты
вырабатываются два других колебания с
частотами
 и
и
 (вторичные опорные частоты), которые
подаются на входы двух генераторов
гармоник (ΓΓ 1
и
ΓΓ 2).
(вторичные опорные частоты), которые
подаются на входы двух генераторов
гармоник (ΓΓ 1
и
ΓΓ 2).
Каждый
из генераторов гармоник состоит из
формирователя импульсов (ФИ 1
и
ФИ 2)
и перестраиваемого полосового фильтра.
Первый преобразует входное квазигармоническое
колебание в последовательность очень
коротких (по сравнению с периодом этого
колебания) импульсов той же частоты
(равными соответственно
 и
и
 ).
Спектр этой последовательности содержит
множество высших гармоники; фильтр
настраивают на нужную из них и выделяют
ее. B результате на выходах генераторов
гармоник получают квазигармонические
колебания с частотами
).
Спектр этой последовательности содержит
множество высших гармоники; фильтр
настраивают на нужную из них и выделяют
ее. B результате на выходах генераторов
гармоник получают квазигармонические
колебания с частотами
 и
и
 .
.

Оба эти колебания подают на сумматор частот, состоящий из смесителя (См) и перестраиваемого полосового фильтра. Последний выделяет из спектра выходного продукта смесителя квазигармоническое колебание с нужной частотой


Смеситель обычно реализуется в виде балансного модулятора.
Пример.
Пусть
 ,
,
 ,
,
 может принимать значения 1, 2, 3, a
может принимать значения 1, 2, 3, a
 - значения 20, 21, 22, …, 39, то система имеет
диапазон частот с шагом сетки
- значения 20, 21, 22, …, 39, то система имеет
диапазон частот с шагом сетки
 от
от
Пассивный цифровой синтез частот
B системах пассивного цифрового синтеза формирование требуемой частоты осуществляются цифровой обработкой сигналов, и только на выходе системы используют аналоговый фильтр.
Структурная схема ССЧ на базе пассивного цифрового синтеза частот представлена на рис. 1.8.

Рис. 1.8. Структурная схема одного из вариантов системы пассивного цифрового синтеза
Опорный генератор формирует высокостабильное колебание с опорной частотой, используемой для получения требуемой частоты на выходе синтезатора. Это опорное колебание преобразуется в последовательность прямоугольных импульсов в формирователе импульсов (ФИ) путем ограничения по уровню сверху и снизу сформированного колебания. На выходе делителя частоты с переменным коэффициентом деления (ДПКД) последовательность импульсов на входе преобразуется в последовательность импульсов, которая следует с частотой, определяемой коэффициентом деления. Коэффициент деления N можно устанавливать равным любому целочисленному значению в пределах от N1 до N2. Его значение определяется счетно-решающим устройством исходя из частоты, установленной на пульте управления частотой. Счетчик на базе триггера формирует цифровые импульсы с требуемой скважностью. Полосовой фильтр (ПФ) восстанавливает из этой последовательности импульсов гармоническое колебание с необходимой частотой.
Рассмотрим пример. Пусть, например, требуется синтезировать сетку частот от 20 до 25 кГц с шагом 1 кГц. При этом частота опорного генератора соответствует 1 МГц.
В этом случае можно использовать коэффициенты деления N=25 (1 000 000/25 = 40 000) и N= 20 (1 000 000/20 = 50 000), при которых будут формироваться частоты 40 кГц и 50 кГц с шагом 2 кГц. В счетчике можно сформировать на базе этих частот поток прямоугольных импульсов со скважностью, равной 2, и частотой, которая может принимать все нужные значения. Наконец, можно с помощью полосового фильтра, имеющего частоты среза 20 кГц (нижнюю) и 30 кГц (верхнюю), выделить нужные колебания, подавив высшие гармоники.
Согласно последним данным статистики примерно 70% всей выработанной электроэнергии в мире потребляет электропривод. И с каждым годом этот процент растет.
При правильно подобранном способе управления электродвигателем возможно получение максимального КПД, максимального крутящего момента на валу электромашины, и при этом повысится общая производительность механизма. Эффективно работающие электродвигатели потребляют минимум электроэнергии и обеспечивают максимальную экономичность.
Для электродвигателей, работающих от преобразователя частоты ПЧ, эффективность во многом будет зависеть от выбранного способа управления электрической машиной. Только поняв достоинства каждого способа, инженеры и проектировщики систем электроприводов смогут получить максимальную производительность от каждого способа управления.
Содержание:
Способы контроля
Многие люди, работающие в сфере автоматизации, но не сталкивающиеся вплотную с процессами разработки и внедрения систем электроприводов полагают, что управление электродвигателем состоит из последовательности команд, вводимых с помощью интерфейса от пульта управления или ПК. Да, с точки зрения общей иерархии управления автоматизированной системой это правильно, однако есть еще способы управления самим электродвигателем. Именно эти способы и будут оказывать максимальное влияние на производительность всей системы.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существует четыре основных способа управления:
- U/f – вольт на герц;
- U/f с энкодером;
- Векторное управление с разомкнутым контуром;
- Векторное управление с замкнутым контуром;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
Широтно-импульсная модуляция применяется к преобразователю частоты путем использования фиксированного напряжения шины постоянного тока. путем быстрого открытия и закрытия (правильней сказать коммутации) генерируют выходные импульсы. Варьируя ширину этих импульсов на выходе получают «синусоиду» нужной частоты. Даже если форма выходного напряжения транзисторов импульсная, то ток все равно получается в виде синусоиды, так как электродвигатель имеет индуктивность, которая влияет на форму тока. Все методы управления основываются на ШИМ модуляции. Разница между методами управления заключается лишь в методе вычисления подаваемого напряжения на электродвигатель.
В данном случае несущая частота (показана красным) представляет собой максимальную частоту коммутации транзисторов. Несущая частота для инверторов, как правило, лежит в пределах 2 кГц – 15 кГц. Опорная частота (показана синим) представляет собой сигнал задания выходной частоты. Для инверторов применимых в обычных системах электроприводов, как правило, лежит в пределах 0 Гц – 60 Гц. При накладывании сигналов двух частот друг на друга, будет выдаваться сигнал открывания транзистора (обозначен черным цветом), который подводит силовое напряжение к электродвигателю.
Способ управления U/F
Управление вольт-на-герц, наиболее часто называемое как U/F, пожалуй, самый простой способ регулирования. Он часто используется в несложных системах электропривода из-за своей простоты и минимального количества необходимых для работы параметров. Такой способ управления не требует обязательной установки энкодера и обязательных настроек для частотно-регулируемого электропривода (но рекомендовано). Это приводит к меньшим затратам на вспомогательное оборудование (датчики, провода обратных связей, реле и так далее). Управление U/F довольно часто применяют в высокочастотном оборудовании, например, его часто используют в станках с ЧПУ для привода вращения шпинделя.

Модель с постоянным моментом вращения имеет постоянный вращающий момент во всем диапазоне скоростей при одинаковом соотношении U/F. Модель с переменным соотношением вращающего момента имеет более низкое напряжение питания на низких скоростях. Это необходимо для предотвращения насыщения электрической машины.
U/F — это единственный способ регулирования скорости асинхронного электродвигателя, который позволяет регулирование нескольких электроприводов от одного преобразователя частоты. Соответственно все машины запускаются и останавливаются одновременно и работают с одной частотой.
Но данный способ управления имеет несколько ограничений. Например, при использовании способа регулирования U/F без энкодера нет абсолютно никакой уверенности, что вал асинхронной машины вращается. Кроме того, пусковой момент электрической машины при частоте 3 Гц ограничивается 150%. Да, ограниченного крутящего момента более чем достаточно для применения в большинстве существующего оборудования. Например, практически все вентиляторы и насосы используют способ регулирования U/F.
Данный метод относительно прост из-за его более «свободной» спецификации. Регулирование скорости, как правило, лежит в диапазоне 2% — 3% максимальной выходной частоты. Отклик по скорости рассчитывается на частоту свыше 3 Гц. Скорость реагирования частотного преобразователя определяется быстротой его реакции на изменение опорной частоты. Чем выше скорость реагирования – тем быстрее будет реакция электропривода на изменение задания скорости.
Диапазон регулирования скорости при использовании способа U/F составляет 1:40. Умножив это соотношение на максимальную рабочую частоту электропривода, получим значение минимальной частоты, на которой сможет работать электрическая машина. Например, если максимальное значение частоты 60 Гц, а диапазон составляет 1:40, то минимальное значение частоты составит 1,5 Гц.
Паттерн U/F определяет соотношение частоты и напряжения в процессе работы частотно-регулируемого электропривода. Согласно ему, кривая задания скорости вращения (частота электродвигателя) будет определять помимо значения частоты еще и значения напряжения, подводимого к клеммам электрической машины.
Операторы и технические специалисты могут выбрать необходимый шаблон регулирования U/F одним параметром в современном частотном преобразователе. Предустановленные шаблоны уже оптимизированы под конкретные применения. Также существуют возможности создания своих шаблонов, которые будут оптимизироваться под конкретную систему частотно-регулируемого электропривода или электродвигателя.
Такие устройства как вентиляторы или насосы имеют момент нагрузки, который зависит от скорости их вращения. Переменный крутящий момент (рисунок выше) шаблона U/F предотвращает ошибки регулирования и повышает эффективность. Эта модель регулирования уменьшает токи намагничивания на низких частотах за счет снижения напряжения на электрической машине.
Механизмы с постоянным крутящим моментом, такие как конвейеры, экструдеры и другое оборудование используют способ регулирования с постоянным моментом. При постоянной нагрузке необходим полный ток намагничивания на всех скоростях. Соответственно характеристика имеет прямой наклон во всем диапазоне скоростей.

Способ управления U/F с энкодером
Если необходимо повысить точность регулирования скорости вращения в систему управления добавляют энкодер. Введение обратной связи по скорости с помощью энкодера позволяет повысить точность регулирования до 0,03%. Выходное напряжение по-прежнему будет определятся заданным шаблоном U/F.
Данный способ управления не получил широкого применения, так как представляемые им преимущества по сравнению со стандартными функциями U/F минимальны. Пусковой момент, скорость отклика и диапазон регулирования скорости – все идентично со стандартным U/F. Кроме того, при повышении рабочих частот могут возникнуть проблемы с работой энкодера, так как он имеет ограниченное количество оборотов.
Векторное управление без обратной связи
Векторное управление (ВУ) без обратной связи используется для более широкого и динамичного регулирования скорости электрической машины. При пуске от преобразователя частоты электродвигатели могут развивать пусковой момент в 200% от номинального при частоте всего 0,3 Гц. Это значительно расширяет перечень механизмов, где может быть применен асинхронный электропривод с векторным управлением. Этот метод также позволяет управлять моментом машины во всех четырех квадрантах.

Ограничение вращающего момента осуществляется двигателем. Это необходимо для предотвращения повреждения оборудования, машин или продукции. Значение моментов разбивают на четыре различных квадранта, в зависимости направления вращения электрической машины (вперед или назад) и в зависимости от того, реализует ли электродвигатель . Ограничения могут устанавливаться для каждого квадранта отдельно или же пользователь может задать общий вращающий момент в преобразователе частоты.
Двигательный режим асинхронной машины будет при условии, что магнитное поле ротора отстает от магнитного поля статора. Если магнитное поле ротора начнет опережать магнитное поле статора, то тогда машина войдет в режим рекуперативного торможения с отдачей энергии, проще говоря – асинхронный двигатель перейдет в генераторный режим.
Например, машина по закупорке бутылок может использовать ограничение момента в квадранте 1 (направление вперед с положительным моментом) для предотвращения чрезмерного затягивания крышки бутылки. Механизм производит движение вперед и использует положительный момент для того, чтобы закрутить крышку бутылки. А вот устройство, такое как лифт, с противовесом тяжелее, чем пустая кабина, будет использовать квадрант 2 (обратное вращение и положительный момент). Если кабина подымается на верхний этаж, то крутящий момент будет противоположен скорости. Это необходимо для ограничения скорости подъема и недопущения свободного падения противовеса, так как он тяжелее, чем кабина.
Обратная связь по току в данных преобразователях частоты ПЧ позволяет устанавливать ограничения по моменту и току электродвигателя, поскольку при увеличении тока растет и момент. Выходное напряжение ПЧ может изменятся в сторону увеличения, если механизм требует приложения большего крутящего момента, или уменьшатся, если достигнуто его предельно допустимое значение. Это делает принцип векторного управления асинхронной машиной более гибким и динамичным по сравнению с принципом U/F.
Также частотные преобразователи с векторным управлением и разомкнутым контуром имеют более быстрый отклик по скорости – 10 Гц, что делает возможным его применение в механизмах с ударными нагрузками. Например, в дробилках горной породы нагрузка постоянно меняется и зависит от объема и габаритов обрабатываемой породы.
В отличии от шаблона управления U/F векторное управление использует векторный алгоритм, для определения максимально эффективного напряжения работы электродвигателя.

Векторное управления ВУ решает данную задачу благодаря наличию обратной связи по току двигателя. Как правило, обратная связь по току формируется внутренними трансформаторами тока самого преобразователя частоты ПЧ. Благодаря полученному значению тока преобразователь частоты проводит вычисления вращающего момента и потока электрической машины. Базовый вектор тока двигателя математически расщепляется на вектор тока намагничивания (I d) и крутящего момента (I q).
Используя данные и параметры электрической машины ПЧ вычисляет векторы тока намагничивания (I d) и крутящего момента (I q). Для достижения максимальной производительности, преобразователь частоты должен держать I d и I q разведенными на угол 90 0 . Это существенно, так как sin 90 0 = 1, а значение 1 представляет собой максимальное значение крутящего момента.

В целом векторное управление асинхронным электродвигателем осуществляет более жесткий контроль. Регулирование скорости составляет примерно ±0,2% от максимальной частоты, а диапазон регулирования достигает 1:200, что позволяет сохранять вращающий момент при работе на низких скоростях.
Векторное управление с обратной связью
Векторное управление с обратной связью использует тот же алгоритм управления, что и ВУ без обратной связи. Основное различие заключается в наличии энкодера, что дает возможность частотно-регулируемому электроприводу развивать 200% пусковой момент при скорости 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других подъемных машин, чтоб не допустить просадки груза.
Наличие датчика обратной связи по скорости позволяет увеличить время отклика системы более 50 Гц, а также расширить диапазон регулирования скорости до 1:1500. Также наличие обратной связи позволяет управлять не скоростью электрической машиной, а моментом. В некоторых механизмах именно значение момента имеет большую важность. Например, мотальная машина, механизмы закупорки и другие. В таких устройствах необходимо регулировать момент машины.

Читайте также:
|
Назначение и принцип действия синтезаторов частот
Синтезатор частот предназначен для управления частотой ГУН (125..177,5) МГц со стабильностью, равной стабильности опорного генератора, и формирования сетки опорных частот с дискретностью через 25 кГц в диапазоне МВ и ДМВ.
Синтезатор частот выполняет следующие функции:
Выдает управляющее напряжение в соответствии с набранным на пульте управления каналом (кодом заданной рабочей частоты) для установки частоты ГУН с заданной стабильностью (1·10 -6), для настройки УВЧ приемника, для грубой установки частот автогенераторов возбудителя.
Исходя из выбранных значений промежуточных частот и видов преобразований, синтезатор частот обеспечивает формирование сетки частот ГУН:
МВ: 125..174,975 МГц с интервалом 25 кГц;
ДМВ-1: 132,5..172,4875 МГц с интервалом 12,5 кГц;
ДМВ-2: 127,5..177,4875) МГц с интервалом 12,5 кГц;
Выдает в блок коммутации признаки МВ и ДМВ-1.
Выдает в пульт управления по трем проводам напряжение синхронизации, позволяющее получить из пульта управления информацию о набранном канале по двум проводам.
В основу построения синтезатора частот положены свойства, присущие системе ФАПЧ с делителем частоты в цепи обратной связи с предварительным преобразованием гармонических колебаний ГУН и опорного генератора с помощью формирующих устройств в последовательность видеоимпульсов. Это позволило широко использовать при реализации схем синтезаторов элементы и узлы дискретной техники и послужило основанием назвать такие системы цифровыми синтезаторами.
Таким образом, синтезатор совместно с ГУН представляет собой схему ФАПЧ.
Для пояснения цифрового метода формирования и стабилизации дискретного множества частот рассмотрим качественную картину процессов, происходящих в цифровом синтезаторе.
Гармонический сигнал высокостабильного опорного генератора с частотой 10 МГц (стабильность частоты опорного генератора не хуже ± 1·10 -6 во всех условиях эксплуатации) первоначально подается на формирующее устройство, с помощью которого оно преобразуется в последовательность однополярных импульсов с частотой сравнения f ср =781,25 Гц, т. е. частота опорного генератора делится до частоты сравнения f ср =781,25 Гц.
При этом синтезатор частот совместно с ГУН, функционально входящим в состав УВЧ, представляет собой замкнутую систему ФАПЧ. Кольцо автоподстройки работает с низкой частотой сравнения 781,25 Гц.
Номинал этой частоты определяется разносом частот между каналами (25 кГц), наличием делителя с постоянным коэффициентом деления (на 8 в ВЧД и на 2 в БУЧ) и удвоителя в составе гетеродина.
Частота ГУН последовательно понижается делителями с постоянным и переменным коэффициентом деления.
Поделенные частоты ГУН и опорного генератора подаются для сравнения на ФД.
Если выходная частота ДПКД (f дпкд) не равна частоте сравнения (f ср), то в ФД вырабатывается сигнал рассогласования, управляющий частотой ГУН. При этом частота ГУН изменяется так, чтобы выходная частота ДПКД стала равной частоте сравнения (f дпкд = f ср = 781, 25 Гц) с точностью до фазы (точная подстройка).
где f гун – частота ГУН; 8 – коэффициент деления ВЧД; 2 – коэффициент деления делителя, входящего в состав БУЧ; N – коэффициент деления ДПКД.
Установка необходимого коэффициента ДПКД производится с пульта управления через систему дистанционного управления СДУ и позволяет производить установку любой частот связи по пяти проводам, связывающий пульт управления с синтезатором частот.
Блок опорной частоты (блок 1-1)
БОЧ предназначен для формирования высокостабильной частоты опорного генератора 10 МГц и понижения ее до частоты сравнения.
БОЧ обеспечивает:
формирование опорного сигнала частотой 20 МГц;
формирование сигнала синхронизации;
формирование стробирующих импульсов для СДУ.
В состав БОЧ входят:
Опорный генератор (субблок 1-1-1) ГО-4А;
Формирователь-удвоитель (субблок 1-1-2);
Делитель опорной частоты.
Опорный генератор служит для получения высокостабильного (стабильность не хуже ± 1·10 -6) напряжения с частотой 10 МГц.
Высокая стабильность частоты кварцевого генератора достигается термостатированием элементов генератора и стабилизацией напряжения питания.
Синусоидальное напряжение с частотой 10 МГц усиливается усилителем и поступает (рисунок 3.1)
На формирователь, где формирует напряжение прямоугольной формы для запуска делителя опорной частоты;
На удвоитель, где формируется напряжение второго гетеродина f ог = 20 МГц в диапазоне ДМВ.
Удвоитель собран по дифференциальной схеме и включается в работу в поддиапазонах ДМВ по команде «ПРИЗНАК ДМВ» с блока коммутации.
Делитель опорной частоты формирует:
Для ФД напряжение запуска генератора пилы с частотой f ср = 781,25 Гц;
Для СДУ сигнал синхронизации с частотой f ср;
Стробирующие импульсы с частотой 1562,5 Гц для дешифратора СДУ.
ДОЧ представляет собой делитель, обеспечивающий коэффициент деления N = 12800, который обеспечивается последовательным включением делителя на 25 и девяти делителей на 2. ДОЧ формирует сигналы (рисунок 3.2):
- «запуск пилы» для запуска генератора пилы в блоке ФД;
- «синхронизация СДУ» для запуска синхронизатора СДУ;
- «стробирующий импульс» для запуска дешифратора СДУ.
Рисунок 3.1
8.4.1. Основные характеристики осциллографов.
1. Полоса пропускания или параметры переходной характерис тики (ПХ) Полоса пропускания - это диапазон частот, в котором амплитудно-частотная характеристика имеет спад не более 3 дБ относительно значения на опорной частоте. Опорная частота - частота, на которой спад АЧХ отсутствует. Значение спада АЧХ в децибелах находят из соотношения
(8.19)
где l f оп - размер изображения на опорной частоте: l f изм -размер изображения начастоте,для которой измеряется спадАХЧ.
2. Неравномерностьамплитудно-частотной характеристики.
3. Нелинейность амплитудной характеристики усилителей осциллографа β а . Значение Р а определяют поформуле
![]() (8.20)
(8.20)
где l -наиболее отличающийся от одного деления шкалы экрана размер изображения сигнала в любом месте рабочей части экрана.
4. Качество воспроизведения сигнала в импульсном осциллогра фе.
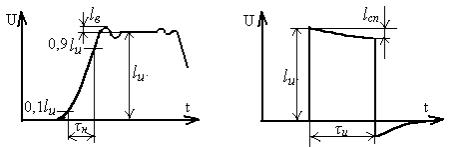
Это качество часто характеризуется параметрами переходной характеристики, к которым относятся: время нарастания переходной характеристики τ н, величина выброса на ПХ, спад вершины изображения импульса.
Время нарастания переходной характеристики τ н определяют как время нарастания изображения импульса, в течение которого происходит отклонение луча от уровня 0,1 до уровня 0,9 амплитуды импульса (рис. 8.14, а).
а)б)
рис. 8.14.
Величину выброса на ПХ δ и измеряют на том же испытательном сигнале, что и время нарастания τ н , и определяют по формуле
![]() ,(8.21)
,(8.21)
где l в - амплитуда изображения выброса; l и - амплитуда изобра жения импульса.
Определение δ и производят на импульсах положительной и отрицательной полярностей.
Спад вершины изображения (рис.8.14, б) нормируют по относительному спаду вершины импульса, который определяют по формуле
,(8.22)
где l сп - значениевеличиныизображенияспадаимпульса;/ и - значение амплитудыизображенияимпульса.
ЗнаяпараметрыПХ,можноопределитьпараметрыАЧХ, и наоборот.Верхняя граничная частота полосы пропускания
(8.23)
где f в - выражена в мегагерцах; τ н - в наносекундах.
Нижняя граничная частота
(8.24)
где f н - выраженав герцах;τ и - в секундах.
5. Чувствительность (нормальное значение калиброванного коэффициента отклонения). Чувствительность ε определяют как отношение видимого отклонения луча в миллиметрах к значению вызвавшего его входного сигнала в вольтах или милливольтах. Коэффициент отклонения K d - величина, обратная чувствительности.
:
![]() (8.25)
(8.25)
где U BX - значениеамплитудывходногосигнала; l -значение изображенияамплитудыэтогосигнала пооси Y .
Нормируемымипараметрамиосциллографаявляютсявсе калиброванныезначениякоэффициентаотклоненияиих погрешности. Погрешность коэффициента отклонения определяют по формуле
 (8.26)
(8.26)
где K d 0 - номинальноезначение K d , указанноевтехнической документации на конкретный осциллограф.
6. Параметры входов . Например: вход открытый (закрытый), входное сопротивление 1 МОм + 3%, входная емкость, параллельная входному сопротивлению, не более 35пФ+10%.
7. Погрешностикалибраторовамплитудыикалибраторов временных интервалов.
8. Длительностьразверток. Длительностьразверток - это время прямого хода развертки, за которое луч пробегает всю рабочую часть экрана в горизонтальном направлении. ДлительностьпрямогоходаразверткиТ п задается в виде коэффициентов развертки
,(8.27)
где 1 Т - длина отрезка горизонтальной оси, соответствующая длительности Т п. Коэффициент развертки характеризуется диапазоном изменений, основной и дополнительными погрешностями. Погрешность коэффициента развертки
 ,(8.28)
,(8.28)
где К рном - номинальное значение коэффициента развертки.
9. Нелинейность развертки. Значение нелинейности развертки в процентах вычисляют из соотношения
![]() ,(8.29)
,(8.29)
где /-длительность наиболее отличающегося от 1 см, или одного деления шкалы, временного интервала в любом месте рабочей части развертки в пределах рабочей части экрана.
Кроме указанных характеристик в соответствии со стандар тами осциллограф характеризуется следующими параметрами: рабочей частью экрана; минимальной частотой следования развертки; толщиной линий луча электронно-лучевой трубки; допус каемым суммарным значением постоянного и переменного напряжений на входах; максимально допустимым значением амплитуды исследуемого сигнала; минимальным значением и минимальной длительностью исследуемого сигнала, при котором обеспечи вается класс точности осциллографа; дрейфом нуля усилителей; запаздыванием начала развертки относительно сигнала синхронизации (для осциллографов без линии задержки); возможностью синхронизации (внешней, внутренней); разностью фаз между каналами; наводками с канала на канал; конструктивными характеристиками (масса, габариты, питание, климатические усло вия и т. д.).
В зависимости от точностных параметров ЭЛО в соответствий с ГОСТ 22737 - 77 «Осциллографы электронно-лучевые» делятся на четыре классаточности.
3.1 Назначение и использование пульта управления частотного преобразователя
На пульте управления преобразователя частоты находятся 2 дисплея индикации (4 разряда, 7 сегментов), кнопки управления, аналоговый потенциометр, индикаторы работы и блочные индикаторы. С помощью кнопок можно устанавливать функциональные параметры, подавать управляющие команды и контролировать работу частотного преобразователя .
Дисплей пульта управления
При настройке (просмотре) функциональных параметров преобразователя на верхнем дисплее пульта управления отображаются коды соответствующих параметров, на нижнем – их значения.
В рабочем режиме преобразователя на обоих экранах индицируются текущие значения величин, которые выбираются с помощью функциональных параметров F 001 и F 002, при возникновении ошибки – код ошибки состояния преобразователя частоты .
Функциональные кнопки
|
Кнопка |
Назначение |
|
Потенциометр |
Увеличение / уменьшение величины опорной частоты, задания для ПИД-регулирования |
|
МЕНЮ |
Вход в меню для установки / просмотра значений функциональных параметров. Значения функциональных параметров начинают мигать, когда их можно изменить |
|
ВВОД / ВД |
В режиме установки значений функциональных параметров: запись (подтверждение) выбранного значения параметра во внутреннюю память частотного преобразователя . При успешном завершении операции записываемое значение прекращает мигать. В обычном режиме: изменение индикации верхнего дисплея. |
|
ОТМЕНА / НД |
В режиме установки: значений функциональных параметров: отмена операции изменения значения функционального параметра и переход в режим просмотра функциональных параметров из режима установки. Выход из меню. В обычном режиме: изменение индикации нижнего дисплея. |
|
В режиме установки значений функциональных параметров: переход к предыдущему параметру или увеличение значения параметра; При работающем двигателе и при активном цифровом вводе: увеличение опорной частоты или задания для ПИД-регулирования (функция потенциометра). В режиме индикации ошибок: переход к следующему коду ошибки. |
|
|
В режиме установки значений функциональных параметров: переход к последующему параметру или уменьшение значения параметра; При работающем двигателе и при активном цифровом вводе: уменьшение опорной частоты или задания для ПИД-регулирования (функция потенциометра). В режиме индикации ошибок: переход к предыдущему коду ошибки. |
|
|
ПУСК |
При управлении с пульта управления: команда «вращение вперёд» |
|
РЕВЕРС / ШАГ |
При управлении с пульта управления: РЕВЕРС – команда «реверсивное вращение», ШАГ – команда «шаговый режим» (выбирается с помощью функционального параметра F 014) |
|
СТОП / СБРОС |
При работающем двигателе: число оборотов постепенно снижается, частотный преобразователь прекращает работать. |
Индикаторы
|
Группа индикаторов |
Наименование индикатора |
Состояние индикатора |
Пояснения |
|
Блочные индикаторы |
Гц |
мигает |
Индикация на дисплее значения устанавливаемого задания на опорную частоту |
|
Гц |
горит |
Индикация на дисплее значения выходной частоты |
|
|
горит |
Индикация на дисплее значения фактического выходного тока |
||
|
горит |
Индикация на дисплее процента выходного тока |
||
|
мигает |
Индикация на дисплее значения оставшегося времени, процент для каждого шага функционирующей программы |
||
|
горит |
Индикация на дисплее значения входного напряжения |
||
|
мигает |
Индикация на дисплее значения выходного напряжения |
||
|
об/мин |
горит |
Индикация на дисплее значения скорости вращения двигателя |
|
|
МПа |
мигает |
Индикация на дисплее значения устанавливаемого задания на давление |
|
|
МПа |
горит |
Индикация на дисплее значения давления обратной связи |
|
|
Ни один из индикаторов не горит |
Индикация на дисплее общего времени работы |
||
|
Индикаторыработы |
М / Д |
горит |
Местный режим управления частотным преобразователем (с помощью пульта управления) |
|
НАПР |
горит |
Установка частотного преобразователя совпадает с направлением вращения двигателя |
|
|
НАПР |
мигает |
Установка частотного преобразователя не совпадает с направлением вращения двигателя |
|
|
ПРЯМ |
горит |
||
|
ПРЯМ |
мигает |
Вращение двигателя вперёд, нагрузки нет |
|
|
РЕВ |
горит |
Реверсивное вращение двигателя, |
|
|
РЕВ |
мигает |
Реверсивное вращение двигателя, нагрузки нет |
|
Просмотр и изменение значений функциональных параметров частотного преобразователя
В частотных преобразователях серии СТА- C 5. CP /СТА- C 3. CS имеется более двухсот функциональных параметров, хранящихся во внутренней памяти, значения которых можно просматривать и изменять, формируя, тем самым, различные режимы работы и общий алгоритм функционирования частотного преобразователя . Значения большинства параметров можно изменять во время работы частотного преобразователя (более подробно см. таблицу функциональных параметров), при этом они автоматически сохраняются при его выключении.
Например, Вам необходимо изменить несущую частоту преобразователя с 3 кГц (заводское значение параметра) до 6 кГц. Тогда необходимо произвести следующие действия:
|
Функцио-нальная кнопка |
Статус состояния частотного преобразователя |
Данные дисплеев пульта управления частотного преобразователя (верхний и нижний соответственно) |
Пояснения |
|
Преобразователь находится в рабочем режиме или остановлен (питание на преобразователь подано) |
На верхнем и нижнем дисплеях индицируются значения величин, заданные функциональными параметрами F 001 и F 002 соответственно |
||
|
МЕНЮ |
Вход в меню функциональных параметров преобразователя. Режим просмотра |
На верхнем дисплее отображается код функционального параметра, который устанавливался последним во время работы преобразователя, на нижнем дисплее – его действующее значение |
|
|
Выбор функционального параметра, значение которого необходимо посмотреть или изменить |
На верхнем дисплее отображается код выбранного пользователем функционального параметра, на нижнем дисплее – его действующее значение |
||
|
МЕНЮ |
Вход в режим изменения значения функционального параметра |
На верхнем дисплее отображается код изменяемого пользователем функционального параметра, на нижнем дисплее – его действующее значение начинает мигать |
|
|
Выбор значения функционального параметра |
На верхнем дисплее отображается код изменяемого пользователем функционального параметра, на нижнем дисплее –мигает значение, выбранное пользователем |
||
|
ВВОД /ВД |
Подтверждение устанавливаемого значения функционального параметра |
На верхнем дисплее отображается код изменяемого пользователем функционального параметра, на нижнем дисплее –значение, выбранное пользователем, перестает мигать |
|
|
ОТМЕНА / НД |
Выход из меню функциональных параметров частотного преобразователя |
Возврат к первоначальному состоянию частотного преобразователя , но с измененной несущей частотой (6 кГц) |
3.2 Пробный пуск частотного преобразователя
Выбор режима управления частотного преобразователя
В частотных преобразователях серии СТА- C 5. CP /СТА- C 3. CS имеется два основных режима управления частотного преобразователя в рабочем режиме: местный (с пульта управления преобразователя) и дистанционный (с клемм управления преобразователя или по интерфейсу RS -485). Для определения режима управления частотным преобразователем используется функциональный параметр F 003.
Перед пробным пуском
Перед пробным пуском проверьте корректность подключения силовых цепей, прочность фиксации болтов, прокладку проводов, целостность силовых кабелей, нагрузку.
Во время пробного пуска
Во время пробного пуска убедитесь, что двигатель плавно разгоняется и плавно останавливается, вращается в заданном направлении, отсутствуют нетипичные вибрации, нехарактерные звуки, дисплеи отображают точные значения.
Проверка направления вращения двигателя
При подаче электропитания на частотный преобразователь , на верхнем дисплее пульта управления индицируется надпись «С TA », далее на обоих дисплеях отображается значение «0.00» (если данное значение больше, чем 0.00, поверните потенциометр в крайнее левое положение). Блочные индикаторы “Гц” и индикатор работы “М / Д” начинают светиться. Этоговорит о том, что на верхнем дисплеем индицируется опорная частота, на нижнем – выходная.
Нажмите и удерживайте кнопку РЕВЕРС / ШАГ, происходит запуск частотного преобразователя , индикаторы работы “НАПР” и ”ПРЯМ” начинают светиться. На верхнем дисплее пульта управления индицируется значение опорной частоты для шагового режима – 5.00 Гц, на нижнем экране – выходная частота (от0.00 до 5.00 Гц), которая в соответствии со временем разгона в шаговом режиме (функциональный параметр F032) возрастает до 5 Гц (до опорной частоты). Отпустите кнопку РЕВЕРС / ШАГ. Показание на нижнем дисплее пульта управления уменьшается до нуля (двигатель останавливается). Значение на дисплее становится первоначальным.
Если при этом вращение двигателя происходило в направлении, отличном от требуемого, то необходимо изменить значение функционального параметра F046. Изменять порядок подключения фаз в соединении частотного преобразователя и двигателя нет необходимости.
Использование потенциометра пульта управления во время пуска
Подайте электропитание на частотный преобразователь , на обоих дисплеях пульта управления отображается значение «0.00», если данное значение больше, чем 0.00, то обязательно поверните потенциометр пульта управления преобразователя в крайнее левое положение. Блочные индикаторы “Гц” и индикатор работы “М / Д” начинают светиться.
Нажмите кнопку ПУСК, начинает светиться индикатор “НАПР”, а индикатор “ПРЯМ” начинает мигать. Преобразователь работает, вырабатывая выходную частоту, которая меньше минимальной стартовой частоты. Поверните потенциометр по часовой стрелке, выставив тем самым опорную частоту преобразователя. Теперь на верхнем дисплее пульта управления индицируется заданная опорная частота, а на нижнем – выходная частота, увеличивающаяся от 0.00 Гц до значения опорной частоты в соответствии с временем разгона преобразователя (функциональный параметр F 019).
Проверьте также другие рабочие параметры преобразователя, такие, как напряжение, ток, с помощью функциональных кнопок ВВОД / ВД и ОТМЕНА / НД.
При нажатии функциональной кнопки СТОП / СБРОС преобразователь перестает работать, уменьшая выходную частоту от опорной (выходной, если еще не достигнута опорная) до нулевой.
Задание / изменение опорной частоты преобразователя
 Допустим, необходимо в
местном режиме управления частотного преобразователя
при неизменных времени разгона и времени
торможения запустить двигатель при опорной частоте питающего напряжения 20 Гц в
прямом направлении, затем разогнать его в том же направлении до номинальной
скорости при опорной частоте питающего напряжения 50 Гц (режим задания опорной
частоты – цифровой с пульта управления преобразователя), после чего осуществить
реверс при опорной частоте питающего напряжения 50 Гц и остановить.
Допустим, необходимо в
местном режиме управления частотного преобразователя
при неизменных времени разгона и времени
торможения запустить двигатель при опорной частоте питающего напряжения 20 Гц в
прямом направлении, затем разогнать его в том же направлении до номинальной
скорости при опорной частоте питающего напряжения 50 Гц (режим задания опорной
частоты – цифровой с пульта управления преобразователя), после чего осуществить
реверс при опорной частоте питающего напряжения 50 Гц и остановить.
|
|
Действие |
Функциональное назначение действия |
Показания дисплеев |
Пояснения |
|
1. Подача питания на преобразователь |
На дисплеях появляется индикация, установленная в преобразователе по умолчанию: опорная частота - верхний дисплей, выходная частота - нижний дисплей. Индикаторы « М / Д » и «Гц» нижнего дисплея загораются, а индикатор «Гц» верхнего дисплея – мигает. |
||
|
2. Выбор режима задания опорной частоты преобразователя: МЕНЮ МЕНЮ ВВОД / ВД |
Вход в меню функциональных параметров частотного преобразователя . Режим просмотра параметров. Поиск кода интересуемого параметра (F 004). Вход в режим изменения параметра. Изменение значения параметра из 1 в 0. Подтверждение измененного значения. |
На верхнем дисплее отображается код функционального параметра, который устанавливался последним во время работы преобразователя, на нижнем дисплее – его действующее значение. На верхнем дисплее отображается код функционального параметра, на нижнем – его действующее значение. Значение параметра начинает мигать. Значение параметра изменено, но продолжает мигать. Значение параметра установлено и перестает мигать. |
|
|
3. Изменение значения опорной частоты преобразователя на 20 Гц: МЕНЮ МЕНЮ ВВОД / ВД |
Изменение значения функционального параметра F 013 с 50.00 на 20.00. |
………… |
Аналогично, как и в пункте 2. |
|
4. Выход из меню функциональных параметров преобразователя: ОТМЕНА / НД Индикация на дисплеях имеет следующие значения: установленная опорная частота - верхний дисплей, выходная частота - нижний дисплей. |
|||
|
5. Пуск двигателя в прямом направлении с опорной частотой 20 Гц: ПУСК |
Индикация на дисплеях имеет следующие значения: верхний дисплей – опорная частота, нижний дисплей – выходная частота, значение которой увеличивается с 0.00 до 20.00 в соответствии с установленным временем разгона (функциональный параметр F 019). Загорается индикатор «ПРЯМ». |
||
|
6. Увеличение опорной частоты до 50 Гц: |
Удерживайте кнопку изменения до получения требуемого значения. |
Опорная частота (верхний дисплей) увеличивается до 50.00, выходная частота (нижний дисплей) также увеличиваются до 50.00, но не мгновенно, а в соответствии с установленным временем разгона. |
|
|
7. Реверсивное вращение двигателя с опорной частотой 50 Гц: МЕНЮ МЕНЮ ВВОД / ВД ОТМЕНА / НД РЕВЕРС / ШАГ |
Вход в меню функциональных параметров частотного преобразователя , изменение значения параметра F 014 с 0 на 1 и выход из меню. Опорная частота (верхний дисплей) соответствует 50.00, выходная частота (нижний дисплей) уменьшается до 0.00, а затем увеличиваются до 50.00 в соответствии с установленными временем торможения и временемразгона (функциональные параметры F 020 и F 019 соответственно). Индикатор «НАПР» мигает во время уменьшения скорости, перестаёт мигать во время ее увеличения. Загорается индикатор «РЕВ». |
||
|
8. Просмотр выходного тока преобразователя: ВВОД / ВД |
Нажимайте кнопку до тех пор, пока не появится индикация выходного тока преобразователя. |
Индикация на дисплеях имеет следующие значения: верхний дисплей – выходной ток преобразователя, нижний дисплей – выходная частота. Индикатор «Гц» верхнего дисплея перестает светится, а загорается индикатор «А». |
|
|
9. Остановка двигателя: Выходной ток преобразователя (верхний дисплей) уменьшаетсядо 0.0, выходная частота (нижний дисплей) – также уменьшается до 0.00 в соответствии с установленным временем торможения. |